ملخص أطروحتي بالعربية حول دقة نظام تحديد المواقع GPS و الإستفادة منها في خدمات مدنية
نشر في 24 أكتوبر 2014 .
جي بي إس GPS هو نظام ملاحة يعتمد على الأقمار الصناعية و الفضاء لتحديد المواقع الأرضية عن طريق إستعمال الإشارات القادمة من أربعة أقمار إصطناعية أو أكثر.
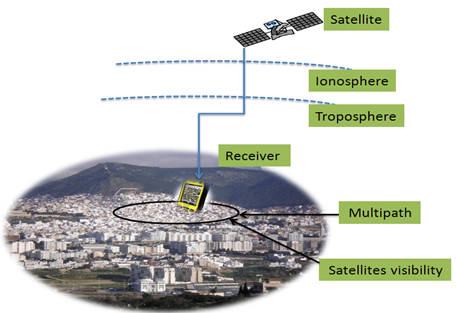
في أيامنا هاته، و نظرا لنجاحه الكبير، توسعت و تطورت إستعمالات هذا النظام لتشمل تطبيقات و مجالات مختلفة. هناك ثلاثة عوامل رئيسية تؤثرعلى دقة قياس هذا النظام: أولا دقة قياسات مواقع الأقمار الصناعية و طريقة توزيعها في الفضاء بالنسبة لأجهزة الإستقبال، ثانيا الأخطاء المتعلقة بقناة الإتصال التي تفصل المستقبل عن الأقمار (الغلاف الجوي ، بيئة المستقبل الأرضية) و ثالثا الأخطاء المتعلقة بالإستقبال (ما يعرف بإشارات الضوضاء عند الإستقبال).
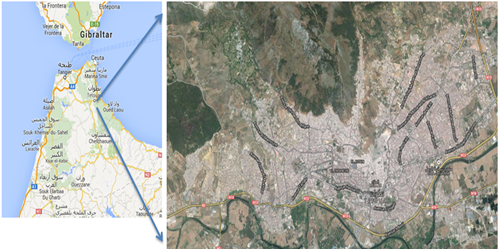
تهدف هذه الأطروحة إلى دراسة و قياس تأثير هاته العوامل، بإستخدام مجموعة من البيانات التي تم الحصول عليها عن طريق مستقبل GPS منخفض التكلفة. تمت معالجة هذه البيانات عن طريق خوارزمية مبرمجة مقترحة. خلال هذا العمل البحثي قمنا بعدة حملات قياس وتخزين للبيانات، في عدة مواقع و سيناريوهات مختلفة غير متجانسة واقعة في مدينة تطوان المغربية، بأجهزة إستقبال عادية كمستقبل ublox و أخرى ذات إستعمال في نظم المعلومات الجغرافية كمستقبلات Trimble Juno SB ، 3D ، SC ، GeoExplorer. أظهرت هذه النتائج مجموعة واسعة من القياسات، تبين توزيعات مختلفة لدقة القياسات، و في توافق تام مع السيناريوهات المدروسة.
المساهمة الأولى لهاته الأطروحة هي النتائج الإحصائية لتوزيع أخطاء القياسيات في فترة من الزمن، و تقدير المعلمات الإحصائية لهاته النتائج. و قد ركزنا في هاته الدراسة على معالجة البيانات التي حصلنا عليها عن طريق مستقبل منخفض التكلفة و نهج خوارزمية مبنية على حزمة برمجيات C++ تهتم بتحليل بيانات أنظمة تحديد المواقع GNSS. مكنت هذه الدراسة من تقدير إحصائيات دقة بعض القياسات عن طريق رسم بيانات تبين تغير هذه العوامل حسب موقع المستعمل في الأرض، و طريقة توزيع الأقمار التي قمنا بتوصيفها هندسيا عن طريق عامل Cost. قمنا أيضا بمقارنة النتائج المحصل عليها بإستعمال كل الأقمار المرئية و بإختيار الهندسة المثلى المشكلة من أربعة أقمار. بينت النتائج توصيفا أمثل للنتائج الإحصائية كا المتوسط و الإنحراف المعياري للأخطاء بإستعمال الهندسة المثلى للأقمار.
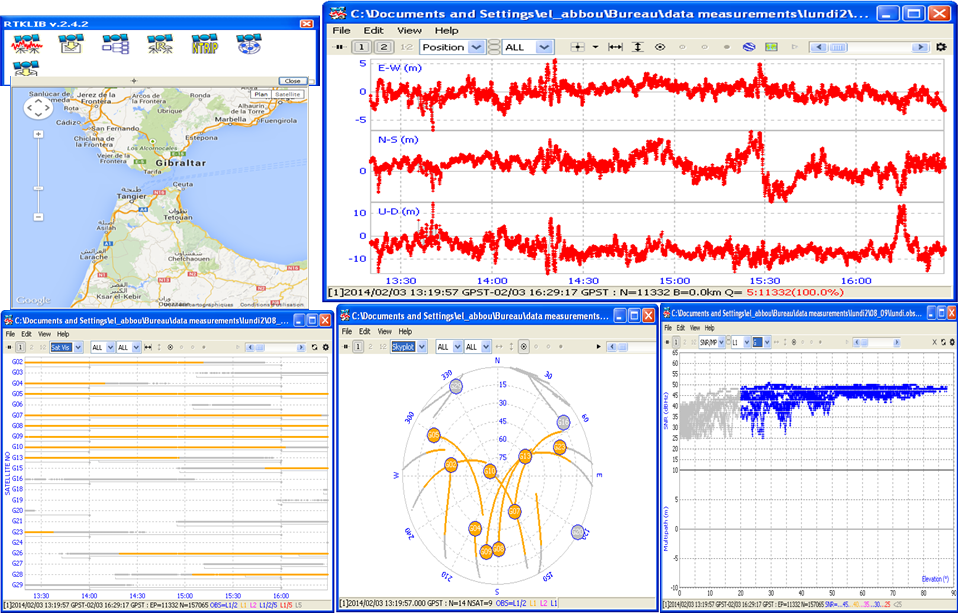
المساهمة الثانية هي خدمة MGIS-GPS بإستخدام الدقة المحصل عليها من كل الأجهزة المستقبلة المتوفرة في إطار هذا البحث حيث سنقوم بتوفير خدمات كخدمة قياس دقة الأجهزة، تتبع المواقع، و إدماجها مع خدمة الأنظمة الجغرافية المتنقلة. سنقوم بذلك عن طريق إستعمال الخدمات البرمجية المتوفرة في مكتبة RTKLIB و إدماج كل الأجهزة المتوفرة بغرض إستعمالها مستقبلا في نظام واحد.




- 7
-
-
 عبد الله العبُّوس - Abdellah El Abbousشريك مؤسس لمنصة مقال كلاود، وشركة خدمات الويب ديفين ويب - مهتم بخدمة الويب، المحتوى العربي الإليكتروني، القراءة، ريادة الأعمال - أنشر بين الفينة و الأخرى بعض الخربشات
عبد الله العبُّوس - Abdellah El Abbousشريك مؤسس لمنصة مقال كلاود، وشركة خدمات الويب ديفين ويب - مهتم بخدمة الويب، المحتوى العربي الإليكتروني، القراءة، ريادة الأعمال - أنشر بين الفينة و الأخرى بعض الخربشات
التعليقات
1 ) الطبقة الأيونية و الغلاف الجوي التي تمر مبها إشارة الأقمار و تساهم بخطأ قد يصل إلى 5 أمتار .
2 ) بيئة المستقبل الأرضية مثلا إذ كنت بين المباني فالخطأ يكون أكبر، قد يصل إلى 10 امتار، مقارنة بالاماكن الفارغة حيث رؤية الأقمار تكون مباشرة، و بالتالي دقة عالية .
3 )عدد الأقمار التي يراها المستقبل، يحتاج على الأقل أربعة أقمار لحساب الموقع و كلما كان عدد الأقمار المرئية أكثر مثلا 8 أو 10 كلما تحسنت دقة الموقع المحصل عليه ...
على الرغم من هذا فالمستقبلات الحالية تحتوي على تقنيات لتصحيح هذه الأخطاء و الوصول في بعض الأحيان إلى دقة تقل عن المتر
لطرح إستفساراتكم و إقتراحاتكم و متابعة الجديد ... ! تابعنا على الفيسبوك
مقالات شيقة ننصح بقراءتها !



مقالات مرتبطة بنفس القسم
الاستدلال - الاستقراء - الاستنباط - الاستنتاج قد يتوهم القارئ أن هذه الكلمات تحمل نفس المعنى.
الاستقراء ( Inductive):تُعرف بأنها الوصول إلى التعميمات من خلال الحقائق والمواقف الجزيئية (الأمثلة)،إذ ينتقل المتعلم من الجزيئات إلى الكليات. بينما يعرفها ماير (Mayer, 2003) بأنها الوصول إلى القاعدة العامة من خلال الحقائق المفردة. أما (قطيط، 2008) فيرى أنها الانتقالقرار ترامب وانعكاساته
قرار ترامب وانعكاساتهعلى الواقع الفلسطيني والعالم بُعَيْد وصول ترامب لسدّة الحُكم في أمريكا، وجهه عدة رسائل غير مسؤولة ضد بعض الشعوب ومواقف عنصرية واضحة، ويصف تلك الشعوب بالحثالة بخاصة شعوب افريقيا. وعمل على تحويل استثماراته ومواقفه الابتزازية من طابع




التداعيات الاسترتيجية لتقسيم سوريا على دول المنطقة.!
طريقة تعاطي دول المنطقة القوية كالسعودية وتركيا مع القضية السورية ارتبط بالمنظور الامريكي المخادع وانسجمت مع خطابه السياسي المراوغ ،هذا المنظور المخاتل يتعاطى مع الاحداث وفق مصالحه التي تحددها جملة مفهوم "الامن القومي الامريكي " وبالتالي فإن هاتين الدولتين
كيف تكتب تقرير أطروحة الدكتوراة في ثلاثة أشـهر !
بعد انتهائي من الأطروحة Thesis التي قمت بها مناصفة بين جامعة عبد المالك السعدي UAE (المدرسة الوطنية للعلوم التطبيقية بتطوان ENSATE) و معهد اتصالات جنوب باريس Telecom Sud Paris و مناقشتها أواخر هذا الشهر 12/26/2015، أحببت أن أشارك معكم تجربتي عن كيفية تحضير و كتابة تقرير الأطروحة في ثلاثة أشهر.. أود
